レーダでは見えない
UFO @ET をレーダ(Radar)で観測するとほとんど見えないはずで、そ
の理由は次のとおり。
レーダ(Radar)からの電波の波長は通常数mmで、ミリ波を使用してい
ます。長さがミリ単位より十分に滑らかであれば、レーダのミリ波は光が
鏡で反射するようなふるまいをします。
私の記憶ではUFO @ET の表面は極めて滑らかであり、その時はレーダ
で次のように見えると考えております。
UFO @ET をレーダで見た時の「目標の有効反射断面積(σ)」 を [横方向]
と [縦方向] に分けて考えます。UFO @ET の表面は滑らかな曲面ですの
で、レーダからは楕円のような形状で見えることでしょう。関係式は次の
ようになります。
「目標の有効反射断面積(σ)」 < 「横方向の大きさ」×「縦方向の大きさ」
この図は手前がレーダの方向です。
初めに、UFO @ET の「横方向の大きさ」について考えます。次の図 ( Fig.1 )
はUFO @ET を上から見た図で「横方向」について考える図です。
UFO @ET で点線の外側で反射する電波はC1のようにレーダ(Radar)
に戻りません。UFO @ET の表面で点線の内側で反射する電波はC2のよ
うにレーダ(Radar)に戻る可能性があります。C2のようにレーダに戻る電
波が物体として認識されます。
概算すると点線の内側がレーダに認識され、外側は認識されません。

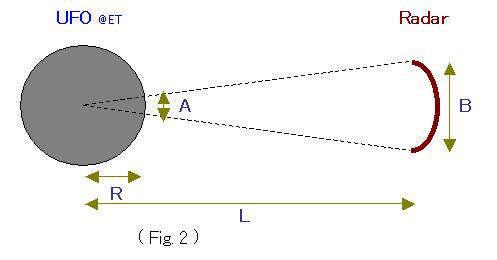
図2 ( Fig.2 ) の
A : レーダで認識されるUFO @ETの大きさ。
B : レーダのアンテナの開口径
R : UFO @ET の半径
L : UFO @ET からレーダまでの距離
と定義すると、各量の関係は次のとおり。
A : B = R : L
レーダで認識される大きさAは次のとおり。
A = B * (R / L )
各量を次のように仮定する。
R = 5 m (UFO @ET の半径)
B = 2 m (レーダの開口径)
L = 10 Km (UFO @ET までの距離) とすと、
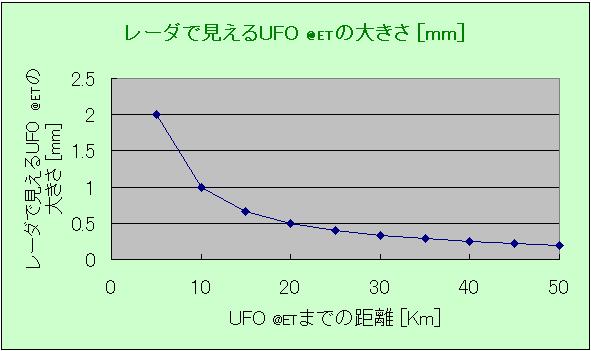
レーダで見えるUFO @ET の大きさは A = 1 mm となる。
UFO @ET までの距離 L を変数とすると、レーダで認識される大きさA
は次のとおり。
A = ( B * R ) / L = (2,000 * 5,000) / L [mm] (式1)
ここでは、「横方向の大きさ」を計算しました。「縦方向の大きさ」につ
いて考えると、UFO @ET は縦に潰れた形状をしていますのでUFO @ET
の縦方向の半径Rは十分に小さく1m以内と推定されます。このため、
レーダで見える「縦方向の大きさ」は十分に小さいと推定されます。
「横方向の大きさ」 >> 「縦方向の大きさ」
このため、「レーダで見えるUFO @ET の大きさ」は 「横方向の大きさ」
が最大の大きさとなります。
この「レーダで見えるUFO @ET の大きさ」を「横方向の大きさ」で表現す
ると、次のような大きさで見えるはずです。(式1)より。 (02版で追記。)
 かってにいってれば。ねむいニャン。
かってにいってれば。ねむいニャン。
